# FlightControl, a simple example of optimizing a trajectory with ceres

Ceres is an optimizer for least squares problems. This scheme can be used to plan trajectories, too! In this example I outline the basic idea of such a planning as well as some suggestions for cost terms the optimization problem comprises of.
# A little bit of context
FlightControl optimizes a trajectory for an aircraft such as a helicopter. This is only a simplified
example how ceres could be used to optimize such a trajectory.
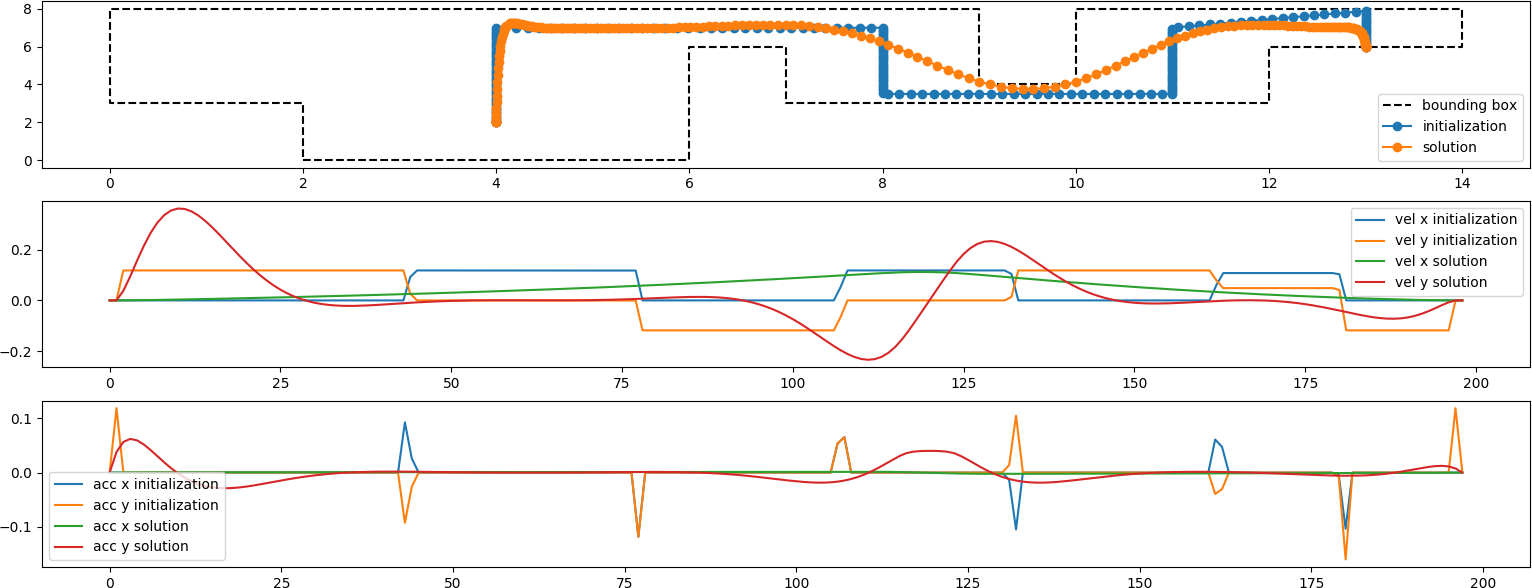
The trajectory is optimized such that acceleration and jerk are minimized (to be more precise: a cost function is minimized, and acceleration, jerk and other things contribute to this cost function). This fosters trajectories which are perceived as comfortable and are convenient in terms of energy consumption.
There are some assumptions to make the problem more interesting:
- The trajectory starts and ends in a zero dynamics state: velocity and acceleration are zero.
- The aircraft has to avoid certain areas. In the plot below the navigation area is outlined with a black, dashed line.
- The aircraft should fly at a desired height.
Simplifying assumptions:
- An initial trajectory satisfying the geometric constraints (stay inside the polygon) is given. This is needed because our optimizer is not good in finding out how to escape the contraints. Such an initial solution could be retrieved e.g. by a sparse graph search and the continuous optimizer is only used to refine the initial solution.
- The optimizer only tries to keep points of the trajectory inside the polygon. Of course there is a motion between two points, and the fact that even if two consecutive points are inside the polygon, the connecting line may not, is ignored here. However, this can be partly compensated by choosing a high number of samples.
- The vehicle is considered to be a point.
# Setup the build environment
I recommend virtualenv to set up a basic build environment while keeping your operating system clean. Install ceres following the instructions here. Don't forget to add the install location to your CPATH resp. LIBRARY_PATH environment variables. If you use virtualenv you can add this to your ${VIRTUAL_ENV}/bin/activate or postactivate script:
export CPATH=${VIRTUAL_ENV}/include
export LIBRARY_PATH=${LIBRARY_PATH}:${VIRTUAL_ENV}/lib
Now your linker should be able to locate the includes and the libraries. The CMakeLists.txt included in this repo is not too smart.
To use the plot.py script, you need numpy and matplotlib installed.
# Build and execute
$ cmake . && make- Now create some trajectories:
./flightcontrol - ... and see the plot:
python plot.py
See world.json in this repository to find out about the problem configuration. It is a JSON format containing
- the weights for the optimizer (
weights), - the bounding polygon for the problem (
bounds) and rawInit, which serves as an initial solution and at the same time determines start and destination (the first resp. last point of the array).